MATE ROV Projects
Four years of building, competing, mentoring, and engineering with the Valley Christian WarriorTides ROV team — from hands-on student to lead mentor and systems designer.
ROV Submersibles
Four seasons of underwater robotics — design, fabrication, and competition
Each year the MATE Worldwide competition presents a new mission scenario tied to real ocean science challenges. The WarriorTides team designed, built, and piloted custom underwater ROVs to complete mission tasks at the regional and international competition levels.
Transitioned from student to mentor, guiding a new generation of student engineers through the full design and build cycle. Contributed to vehicle architecture decisions, documentation strategy, and competition preparation.
Served as a senior team contributor, taking on expanded responsibility for subsystem design and fabrication. Helped mentor junior members while continuing to push the vehicle's capabilities for a more complex mission profile.
Continued to deepen engineering skills as a returning team member. Contributed to vehicle design iterations, assembly, and testing. Gained hands-on experience with systems integration and waterproofing techniques.
Joined the WarriorTides team in its founding year. Built foundational skills in ROV design, thruster configuration, and tethered vehicle control. Competed in the MATE regional competition and produced the team's first engineering documentation package.
GO-BGC Float "Geoff"
Non-ROV Device Design — November 2023
MATE competitions include a Non-ROV Device challenge requiring a separate engineered device that addresses a mission-specific objective. For the 2023 season, the WarriorTides team designed and built "Geoff" — an autonomous buoyancy engine–driven profiling float modeled after the GO-BGC (Global Ocean Biogeochemical) floats used in real oceanographic research.
GO-BGC Float "Geoff" — 2023 Non-ROV Device
- Designed and built a buoyancy engine–driven profiling float using a syringe-based system to control ascent and descent through water intake.
- Integrated embedded electronics including an ESP8266 microcontroller, BarO2 depth sensor, H-bridge motor driver, and custom PCB for actuator control and data acquisition.
- Engineered a dual-enclosure pressure system with leak-tested housings and pressure equalization to ensure structural integrity at depth.
- Implemented safety features including fused battery protection, pressure relief mechanisms, and depth-tested components to prevent failure under load.
Dreams to Design Camp
MATE-affiliated STEM Education Initiative
The Dreams to Design Camp is a MATE-affiliated outreach program that brings underwater robotics and engineering design to middle and high school students. As an experienced ROV team member, Zachary helped instruct students in CAD design fundamentals and the engineering design process, with a focus on making technical topics accessible and engaging.
- Instructed middle and high school students in SolidWorks CAD fundamentals and design thinking
- Guided participants through the engineering design process — from problem definition to prototype
- Facilitated hands-on sessions introducing students to underwater ROV concepts and underwater robotics
- Helped build student confidence in technical disciplines through mentorship and approachable instruction
- Reinforced core STEM concepts in a project-based learning environment
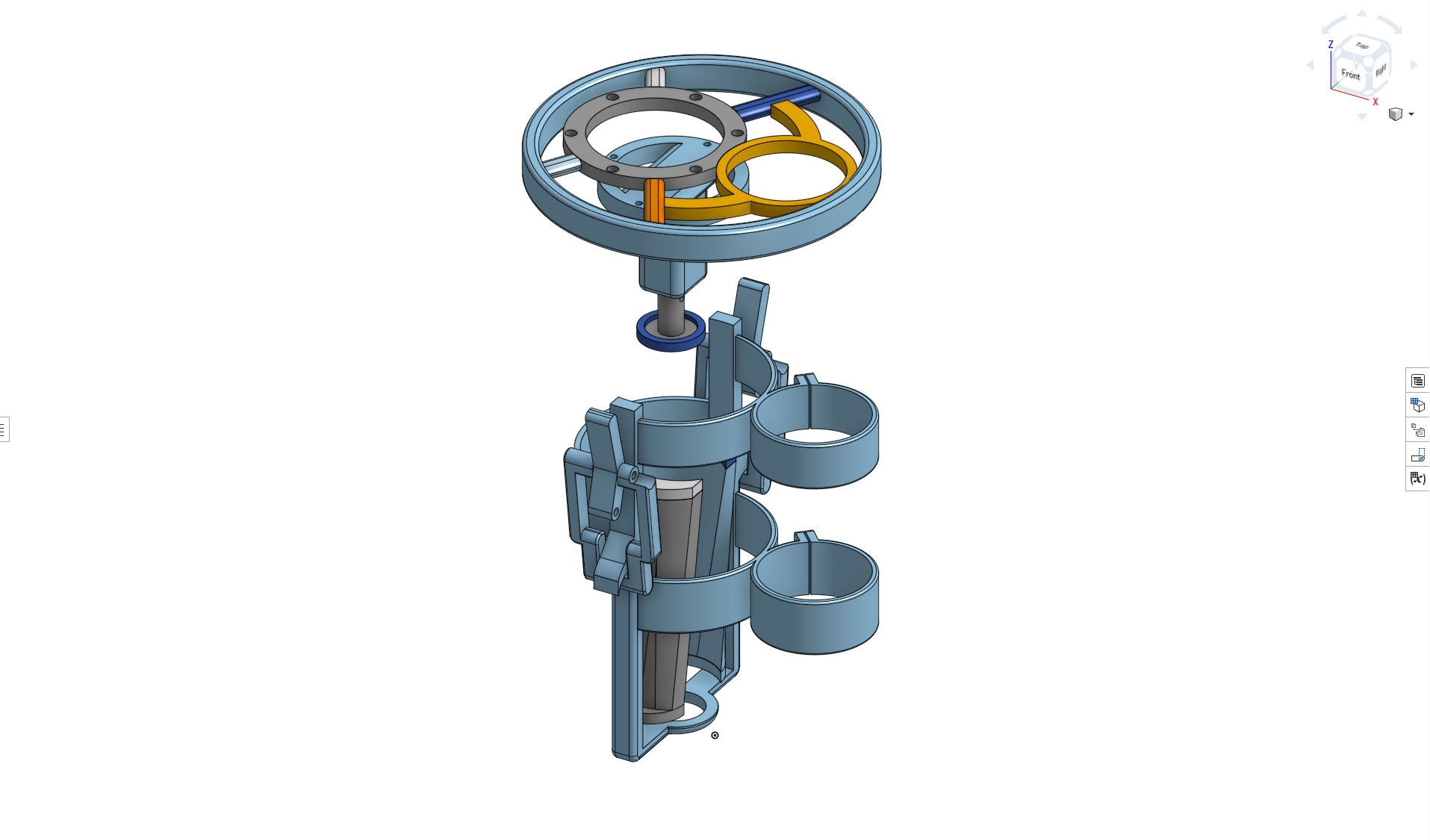
Gear-less Claw Manipulator
Custom End-Effector Design — 2022–2023 Season
To address the 2022–2023 mission's object manipulation requirements, the team developed a custom gear-less claw manipulator designed to attach to the ROV. The gear-less approach reduces mechanical complexity and potential failure points underwater — a deliberate design choice driven by reliability requirements in the competition environment.
- Designed a gear-less actuated claw specifically for underwater ROV attachment
- Gear-less mechanism chosen for improved reliability and reduced maintenance in a wet environment
- Sized and toleranced for the 2022–2023 mission's object pickup and placement tasks
- Documented in the 2022–2023 technical report alongside the full vehicle system